
【葡萄牙】DJI小殘手經驗分享+自駕游玩攻略




不過這一次的旅拍還真是學到了不少,尤其是對於海邊航拍的經驗,總結分享給大家。
我們使用的設備是:DJI Mavic2Pro
操作習慣: 美國 手
附件:雙電,PGY帶夜航燈起落架

以下內容僅供參考,大家請自行判斷且為自己的行為負責,有錯誤之處望指正。
好了,我們這次先劃重點
——▷劃重點◁1、建議下載官方APP:Voa Na Boa,可以查看 葡萄牙 具體限飛情況
2、註意海風,沒有把握就放棄飛行計劃,以免放生或發生危險
3、在海濱要重點註意海鳥,尤其數量較多時,一定要果斷放棄飛行計劃
4、人多的景點尋找人少的地方起飛降落,遠一點不怕,飛過去
5、儘量學會手持起飛降落,受地勢與人因素的影響會降到最低
6、合理安排拍攝路線,避開危險區域,省時省電

葡萄牙 ——限飛區域和限制還是蠻多的
需要你在出行的前2周向兩國空管局提出申請,
豆瓣文章詳解: https://www.douban.com/note/658892678/
還有一個論壇上 葡萄牙 飛無人機的帖子: http://mavicpilots.com/threads/drone-laws-portugal.13836/ 。
基本原則如下:
1、不要飛躍超過12個人以上
2、需要獲得ANAC授權,才能使用超過25公斤的TOW無人機,
3、對於120米以上的和BLOS的夜飛,需要ANAC的授權
4、不要飛越限制,禁止,危險,保留或臨時保留的區域,如軍事設施,國家建築,大使館,監獄和學校或大學等教育設施。
5、如果想拍照或錄製電影,需要獲得AAN(autoridade aeronautica nacional)特別授權
6、如果不在限制區,可以飛越國家公園,但是需向公園管理局申請許可
7、如在海灘或懸崖等沿海地區飛行,需要獲得該地Capitania do Porto許可(Capitania do Porto - 港務局)
8、尊重他人的隱私
9、除非獲得ANAC的授權,否則不得靠近建築物,國家古跡和城市地區。
種種原因,我們放棄 裡斯本 和 波爾圖 這樣的城市航拍,選擇西南沿海主要拍自然風光。




1、風級,風級是我們判斷風速大小的最直接參數,如下圖:
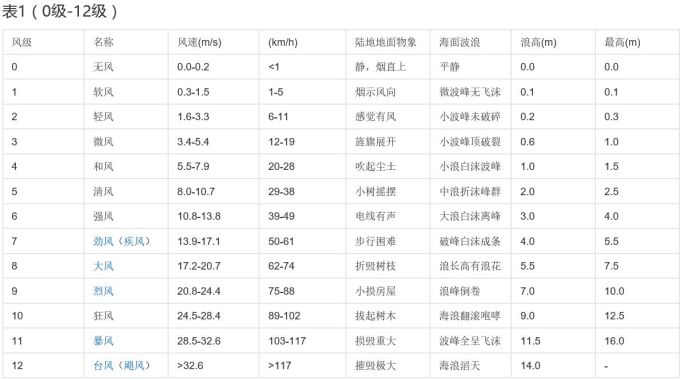
——那我們如何判斷風級呢?
可以根據上表中描述的現象來判斷(需要經常練習積累經驗);
可以用手持風速計測得;
可以下載專業的氣象APP提取數據,推薦windy: https://www.windy.com ;
我在海邊的判斷主要是看海鳥,如果海鳥不扇翅膀能在空中懸停如靜止,此時大概在4~5級;如果海鳥在空中懸停不停搖擺或不願起飛,這時就在7級左右了,比較危險;還可以看長髮,抖動在5級左右;抖得很厲害或橫著飄,接近7級了。
我的原則是5級可飛,以上放棄飛行計劃。
2、迎風區與背風區,迎風區是普遍存在的,背風區則需要有能夠抵擋或打散風的足夠大的物體,如山壁、龐大的建築、足夠茂密的樹林。它們朝向風來的一側是迎風區,相對的另一側就是背風區。背風區的風會減小1至數個等級,有時甚至感覺不到風。背風區是理想的起降和飛行區域,但它不一定是你理想的拍攝地點,而且也不一定百分百安全地帶,有時會由於遮擋物的結構或疏密突然出現陣風造成的亂流。
迎風區由於風力強勁,順風飛和逆風飛會有很大飛行速度差異,尤其順風時要控制好速度以免炸雞。
所以相對於迎風區,選背風區做為起降點更為穩妥。只是要註意:第一,與遮擋物保持一定距離作為起降點,不要完全躲進背風區會失去對風的判斷。第二,如果你想飛出背風區拍攝,一定試探性的往外飛,而且讓無人機先水平飛離遮擋物再上升或改變航線。第三,返航一樣要遠離遮擋物,繞飛到背風區邊界再進背風區。
3、海濱地貌,海邊有很多種環境,風在這些地方會有不同的情緒。
沙灘,持續定向的風較為常見,風的情緒還算穩定,只要風級允許便可起飛。
港口,一般情況下較為溫和,但船隻很多,儘量繞飛。
懸崖,懸崖的頂部風會很強勁,如果懸崖朝向迎風,還會在崖壁產生上升氣流甚至橫向的亂流,所以飛行時要遠離崖壁。
海洞、海蝕地貌、懸崖半島,這些地貌是海邊最精彩的景色,也是最危險的殺手,風大時可產生不可預測的各種亂流。如果它們在迎風區,儘量繞飛或俯拍上帝視角;在背風區,可以拍一些近景;無風天,你就可以玩穿越了,但做好圖傳信號丟失的準備。懸崖半島的迎背風區差異會十分明顯,大家有機會可以體會一下。





接下來是災難——海鳥襲擊。你沒看錯,海鳥是會襲擊無人機的,或把它當成美餐捕獵,或把它當成領地入侵者驅逐。
我遇到了三次,
一次是在佩達德海角,當時我正在拍海蝕地貌,回來後看視頻才看到有一隻海鷗沖向了我的屏幕,當然它及時轉向規避了,不然就是場血案;
一次是在西海岸,從懸崖飛下去拍崖壁海岸與驚濤,兩隻海鳥緊緊的尾隨在無人機後上方,這次是在視距內所以有所準備,果不其然其中一隻俯衝下來撲向了飛行中的無人機,我及時做了規避動作躲開了,但嚇的我們都同時叫出聲來了,之後果斷返航;還有一次是在聖文森特海角,這裡的海鳥巨多,落了一屋頂,當天我們計劃要拍日落,可雲非常多,於是下午想先飛一次踩踩機位,我在 燈塔 稍遠的西側起飛,剛飛出去15秒, 燈塔 院內的海鳥們便一擁而起,大概有五十隻左右,此起彼伏地喊著my my my......黑壓壓一片沖向無人機,我直接手控飛奔返航了,狼狽到極點,鳥群盤旋著半個小時都不願離去,於是,我們走DJI,回了趟家拿塊剛充的電池再回來,這才都落下了,於是乎我換了更遠的東側起飛點(這裡離鳥群休息的地方較遠),從海上繞飛過去拍攝,終於瞞過了所有鳥仔,飛去飛回。
總結一下:
有鳥的地方儘量在視距內飛行,規避反應較快。
遠離鳥棲息的地方起降。
飛行線路儘量避開鳥群多或棲息的地方。
留心觀察鳥的一切反應,很有必要試飛,狀況不好果斷放棄飛行計劃。 ——▷人◁人是迴避中的重點,起飛降落要選人少的地方,防止圍觀也減小第三方傷害的可能性。在海邊要留意海釣的人,繞飛,不要從頭頂或魚桿附近飛過,不然釣到的可能是你的無人機。註意人們同行的孩子或者寵物,要躲開他們起降和飛行。







起降第一式:攜帶起降平臺
配件中的便攜式起降平臺可以幫飛手在一些特殊地形快速搭建出一個可供無人機起降的場地。
個人認為
優點:實現了到部分地形可起降的條件。
缺點:不是所有的地形都能實現,對地形有一定的基本要求,搭建還是需要時間的(旅行航拍的時間是非常重要的,我會在飛行規劃中講)。雖說便攜,畢竟還是多了件東西,累贅。而且在起降過程中多了件東西就多了一個風險來源,如平臺沒法固定,固定不牢,風大掀翻掀飛等,大家自行腦補。
最後的最後,還得多掏一份錢,對於我這種愛財如命的,果斷NO!
起降第二式:添加起落架
配件中的起落架可以加高無人機機身,從而實現在一些特殊地形的起降條件。
個人認為
優點:實現了到部分地形可起降的條件。提升了機身高度後不用為機腹那些嬌嫩的儀器會受地面雜物侵害而擔心了。可加載夜航燈。一旦出現特殊情況需要迫降時,迫降地點的可選度廣,增加生還率。
缺點:需要安裝時間,熟練後還是很快的,所以忽略不計。需要考慮起降的穩定性,畢竟腿長重心高。還有增加了少量的風擾。
中和利弊,我還是比較推薦安裝起落架的。
起降第三式:利用車頂等
利用你周圍現有的資源,實現起降環境。如自駕車的車頂,船的甲板,硬質較大較平的背包,你的旅行箱等等。
個人認為
優點:實現了到部分地形可起降的條件。
缺點:得看當時有沒有。。。得看想象力和膽量有多大。。。還是有一定的風險因素的。
我只在車頂及陽臺的小圓桌做過起降,相對還是很安全的,但不推薦此種野路子。
起降第四式:終極絕學——手接
這種方式是我打知道無人機之初就已經聽說了的野路子,但一直沒有敢學,是有一點害怕,但更多是找不到更多的經驗分享。直到這次旅行,在卡米洛Camilo海灘遇到了一位有著同樣機型的外國前輩,偷學Get到了手接降落,之後自通了手起。
個人認為:
優點:無視一切地形,只要你能騰出雙手,我就帶你擁抱藍天。
缺點:存在很多危險性,需要長期練習和學習相關知識。
這裡是本章節的最大福利,我會把我的經驗總結羅列,只要大家靜心練習,早晚會手到擒來收放自如!
先BB兩句事情的經過,為大家做好學習準備。那天下午我們來到卡米洛海灘附近的一處崖壁上,多雲,光線由於風大時好時壞。我們正猶豫著要不要飛,三個外國人走了過來,其中一個是飛手,其他兩個是“演員”。飛手很快展開了DJI放在了地上,當時地面起降條件還不錯,我們一看是同型號於是主動攀談了兩句。飛手打桿敏捷但很精準,沒有多餘動作,一看就是老手。越肩、巡航、返航,很流暢,之後又補拍了一輪備用。一切拍攝完成後是一套漂亮的手接降落,直飛返航到達頭頂三米左右,旋轉機身側向減速(應該是為了調整與手的相對方向,看上去就是在空中甩尾,拉風的很),垂直下降,伸手,穩穩的捏住機身,電機停機,一氣呵成。看的我們大氣不敢喘。
好咱們按步驟講解一下:
首先——降落
1、返航,我的習慣是,如果超視距的話就先用機子的自動返航系統,等它方向轉到了之前標定的起飛點後,取消自動返航後手動返航。這樣的好處是,很快速的把回航的航程變為兩點一線,返航航程最短且方向精準。取消掉是為了讓無人機以當前高度返航,免去了修改返航高度的操作,而且手動操作可以實時修正如:飛手與無人機之間有障礙物需要繞行;你的降落位置與起飛時發生了變化這些問題。
2、調整姿態,當無人機返航至頭頂附近時,需要調整無人機的方向以順應你抓握它降落的姿勢。這個需要先在平地多練習,看飛手的抓握習慣,是喜歡橫在面前抓還是順向在面前抓還是斜著抓,總之一定要選你最舒服的角度,只有這個角度你抓握才是最穩的,不容易脫手。切記一定是調整無人機的姿態順應人,不要人去找無人機,因為降落時我們的註意力全在無人機上,很容易忽略腳下與身邊的情況釀成悲劇。
3、手接,最關鍵的一步。我們選擇慣用手為接機平臺,以我為例右手伸出接機,左手單手持控制器控制油門下降(這個姿勢對我來講是最舒服的)。接機的手臂要舉過頭頂(最安全姿勢),眼睛略過手看向無人機,形成三點一線(有偏差可以及時發現,調整或停止降落)。手部姿勢,大拇指伸開其餘四指併攏,整個手掌成U字形,豁口沖向無人機微微張開,就像機械抓臂。無人機降到一定高度會懸停一下,這是下視覺及熱感輔助系統偵測到了手掌。下拉油門不要動,無人機會進入降落程序。這時接機的手由無人機腹下五指垂直向上接機,大拇指與其餘四指分別在無人機機身兩側,保持原手勢,當指尖接近電池兩側固定按鈕時,抓緊機身(手指不要按到電池固定按鈕再抓)。
4、停機,左手的油門桿向下拉住不要動,直至電機停止轉動再鬆開。停機前接機的手可以慢慢垂直把無人機放低,但不可垂下或翻腕,無人機會調整姿態導致脫手。手降完成。
再說——起飛
1、準備姿勢,我們從完全關機的狀態說起(以下都為單人操作,如果有人幫你那更好)。前提你的雙腳能站的很穩並能騰出雙手,不要勉強自己。還是以慣用手為起飛平臺,右手和降落時一樣從下捏住無人機兩側,切忌指尖不要超過電池按鈕(螺旋槳切指頭),把無人機橫向放在眼前,手臂微彎,大小臂成九十度左右夾角,左手將以裝好手機的遙控器放在小臂上,手機底邊卡在臂肘內關節處,這樣相對較穩。左手可以自由操作啦,開手機進APP,開遙控,開無人機電源。
2、啟動,一切檢測正常後準備啟動電機。用左手三個手指按住遙控器小屏幕,騰出大拇指與食指,一同下推左右搖桿,內八,電機啟動。按住遙控器是為了右手手臂可以輕微前伸以免螺旋漿劃傷自己。此步驟是極高危險動作,如果不適合自己身體條件切勿模仿,還是找朋友幫忙或找地方起飛穩妥。
3、放飛,左手從右臂取下遙控器,註意不要碰到搖桿。右手慢慢將無人機舉過頭頂後左手開始輕推上升油門(不要一下推到底),你的右手感覺到無人機升力後開始慢慢放鬆手部,左手油門控制住維持現狀,無人機將從你的右手脫出懸在空中。噢可,開始你的表演吧~
以上為我個人總結的野路子,僅供參考,希望大家在專業人士的指導下嘗試和練習。
起降第五式:“神級”——拋飛
用這種方式起飛的大多是搞笑博主,或挑戰人生的人。也有一些公司的產品本身具備拋飛的功能, 比如 很早的Lily,Hover Camera,Parrot的一些固定翼飛行器也可實現。
我還是抱著DJI在一旁吃瓜瓜最好。。。 ——▷飛行規劃◁既然是以拍攝為目的,做好計劃是非常必要的,一個好的飛行計劃可以讓你帶回的素材保質保量。
路線規劃,飛行的路線設計,我們一般要將當時要拍攝的對象、光線、天氣都考慮進來,再把推拉搖移跟的鏡頭語言拼合成我們的飛行路線。
舉個慄子:我們要拍攝一個 燈塔 的素材,可以選擇在順光的一面稍遠的地方起飛,飛到合適高度調整好雲台角度先咔嚓一張,之後我們開始拍攝,向 燈塔 推進無人機,當 燈塔 在畫面內占比變得比較大的時候,我們開始對 燈塔 順時或逆時繞飛(也可以在繞飛時加上後拉和上升動作讓透視變得更豐富),等繞到背光面可以橫向慢飛拍攝逆光(如果有水面粼光或日出日落或月亮,一定要利用好它們),之後可以上升同時緩緩下搖雲台拍 燈塔 ,到達 燈塔 上空之後停止拍攝,然後上帝視角再咔嚓一張,之後就可以越過 燈塔 返航了,返航的過程中還可以倒飛拍攝後拉離去鏡頭(不拍攝也沒關係,我們前面已經拍了推鏡,回家後期倒放就可以啦)。這樣一趟十分鐘以內就差不多可以完成拍攝了,而我們得到了至少兩張照片和四段視頻,電量只耗費了20%~30%。
時間規劃,拍攝的時間點對於最終拍攝效果有著直接的決定性作用。儘量選擇清晨和傍晚有晨暮光的時間段進行拍攝,因為光色比較好,冷暖對比大,其他的時間點也有他的好處。天氣和自然規律也是我們航拍時間規劃的必須考量因素,如想拍海浪最好趕在漲潮的時間去,拍日落日出要提前查好當地時間點,拍城鎮夜景掌握大概的亮燈時間,雲量多時根據云的疏密和風向風速推測雲散的可能性和時間等等。航拍的時間規劃是跟我們旅行的時間規劃緊密的聯繫在一起,如何合理安排,孰輕孰重就看自己了。舉個慄子我們通常是這樣做,如果到了一個要航拍的地方,雲多光線不好,但遠處的雲有大量間隙,那麼我們先參觀游覽,踩踩拍攝角度捎帶等等光,等一下有光線了,立刻開始航拍。
電量規劃,除了環境與時間因素外最限制飛行計劃的就是電池電量了,如何用有限的電量拍攝更多的素材,這是一個問題。上面所說過的路徑規劃就是為了我們少飛空程,儘量航與拍合一,可以省下不少電量。打桿儘量做到慢推慢放,減少急停急轉,這些猛加減速會耗費很多電量。我們一般這麼做,滿電時先拍長距離鏡頭,低於30%後拍短距離鏡頭和人物環繞鏡頭,這樣低電時隨時可以降落。降落後電池裡一般還有十幾的殘電,好好利用它,可以手持拍一些素材,時刻註意電量不過放就好。這樣一塊電池的電量就被我們妥妥的榨幹了,哈哈哈。




總結一下
起降點的選擇要慎重,周圍儘量開闊,地勢較高為好。
對飛行航線的途經環境充分瞭解,預判信號盲區,提前繞行。
飛行過程中可以物色幾個備降點。
養成查看遙控器小屏的習慣,瞭解個參數位置,斷圖時可根據參數繼續操作。
瞭解自己的實時飛行位置,斷圖後不要做倒飛和側向飛行,根據最後的相對位置爭取恢復圖傳。
斷圖時,沒有十足把握儘量不用自動返航功能(很多小灰機就是這麼放生的)。
按照飛行地點的情況及時修改返航飛行高度,養成此習慣,高枕無憂。



關於取景,DJI手機上的飛控信息太多,以至於有時候妨礙到拍攝取景,這時可以單指在屏幕上向上劃一下或向下劃一下,飛控界面就會隱藏起來完全變成一個取景器,這時可用遙控器上的快捷鍵來進行拍攝,之後再劃一下回到飛控界面。
關於Mavic2超解析拍照,超解析照片的取景十分困難,它的畫面中心並不是雲台轉向哪就以哪為中心,它還是一套固定程序。我測試的當前經驗是以雲台-18為中心取景角度之後周圍擴充到大概160度的視野。所以我們在取景時要比在取景模式下看到的離被拍景物更近一點,照出來的才合適。
關於姿態球,在屏幕左下角的mini地圖右上角有個切換鍵,可以把地圖切換成姿態球,這有助於我們瞭解無人機在空中的實時姿態,瞭解氣流情況。
關於夜航,夜航時加載夜航燈還是非常必要的,雖說對於前置光學蔽障的幫助有限,但對於返航尋機定位幫助還是蠻大的,所以我一般會把夜航燈的角度調整為-20~-30度之間,亮度調至最低,主要作為信號燈使用,低亮度在降落時可以減小對眼睛的刺激。底部照明在快著陸時再打開,可以把底部照明開關設置在C1C2擴充鍵上,方便操作。PS:Mavic2前端的航行燈可以關掉,沒有啥用,拍攝時也會自動關閉的,省不了多少電,省點是點。
以上章節為本人此次旅拍經驗總結,僅為個人見解,並非權威,有誤之處望海涵指正,謝謝觀看!










